
Prosthetic Hands
Anthropomorphism
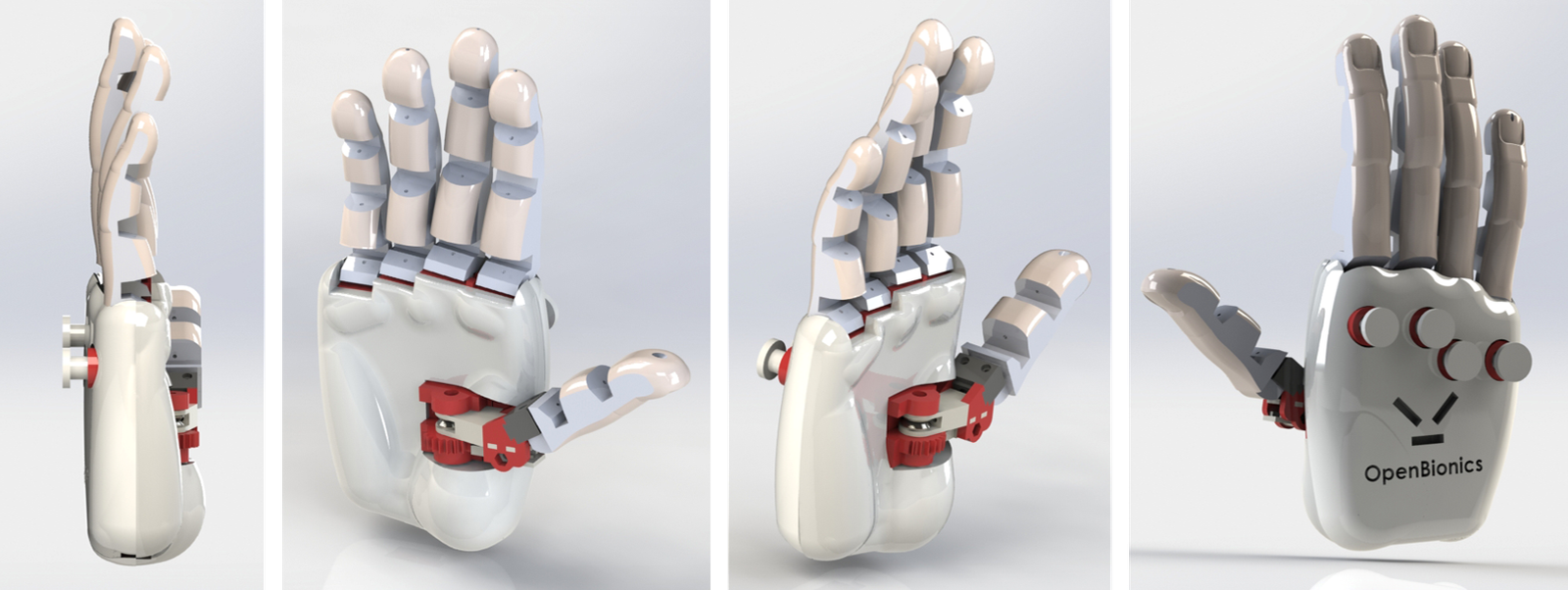
Motivated by the structure and functionality of human hand, the most versatile and dexterous end-effector known, we argue that anthropomorphism is an important feature in hand design, resulting in improved performance for a variety of every day life tasks. In our design, anthropomorphism is reflected in two specific design choices: 1) the use of an anthropomorphic kinematic model and 2) the use of a bio-inspired finger actuation and transmission system. In order to optimize anthropomorphism we use the index described in the anthropomorphism section of this website.
Bio-inspired Compliant Robot Fingers with Soft Fingertips
The finger actuation and transmission system follows a bio-inspired design that structurally reproduces the flexion (with tendons driven through low-friction tubes) and extension (using elastomer materials) movements of human fingers. The structure of the finger is constructed with Plexiglas (acrylic) and the flexure joints are implemented with silicone sheets.
For the robot fingers we use also the following materials: 1) sponge like tape that is easily deformable (to enlarge contact patches, reduce contact forces impact to the grasped object and enhance stability), 2) rubber tape (to increase friction and constrain the sponge like tape on the robot phalanges) and 3) anti-slip tape (to maximize friction during contact, enhansing stability of grasps).
Thumb Mechanism
A selectively lockable toothed mechanism that can implement 9 different opposition configurations, is proposed for the thumb. The proposed mechanism substitutes the three Degrees of Freedom (DoF) that implement the human thumb opposition with only one rotational DoF. The proposed mechanism is completely stiff when it is locked and is not affected by torsional forces inherent in dynamic / unstructured environments. A separate tendon routing system is used for the thumb and its tendon is terminated to a separate servo pulley.

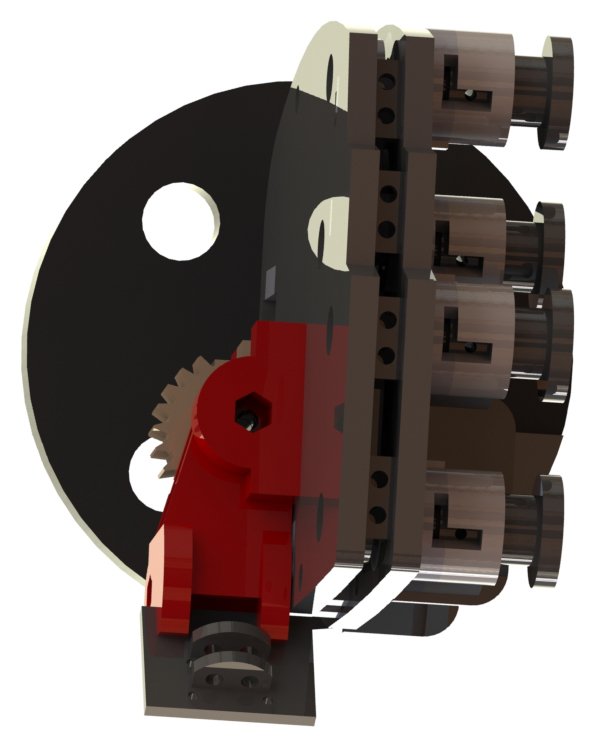
Selectively Lockable Differential Mechanism (Whiffletree)
We propose a novel selectively lockable differential mechanism that can block the motion of each finger, using a button. The differential allows the user to select in an intuitive manner the desired finger combinations, implementing different grasping strategies with only 1 motor. The top two bars of our whiffletree have appropriately designed holes and the palm accommodates a series of buttons that upon pressing are elongated. The idea is that when the button is pressed the elongated part fills the appropriate finger hole and the motion of this particular finger is constrained.
A total of 16 different index, middle, ring and pinky combinations can be implemented using the differential mechanism and a single motor. These can be combined with the 9 discrete positions of the thumb, to produce a total of 144 different grasping postures.
 |
 |
Personalized Designs
Τhe use of parametric models derived from human hand anthropometry studies, allows for the development of personalized prosthesis. The only parameters that we need in order to derive the finger phalanges lengths and the personalized finger base frames positions and orientations, are the human hand length (HL) and the human hand breadth (HB).
The proposed hands can be fabricated using off-the-shelf, low-cost materials and rapid prototyping techniques (3D printing) or standard machinery tools. All required materials can be easily found in hardware stores around the world.
 |
 |
Files
All the designs, electronics, and software required to replicated and control our devices can be found in our GitHub repository:
OpenBionics GitHub Repository