
Videos
Affordable, Body-Powered Exoskeleton Gloves
Soft, under-actuated and compliant robotic exo-gloves have received an increased interest over the last decade. Possible applications of these systems range from augmenting the capabilities of healthy individuals to restoring the mobility of people that suffer from paralysis or stroke. Despite the significant progress in the field, most existing solutions are still heavy and expensive, they require an external power source to operate, and they are not wearable. In this project, we focus on the development of an adaptive (underactuated and compliant), tendon-driven, wearable exoskeleton glove and we propose a compact, affordable and lightweight assistive device that provides grasping capabilities enhancement to the user.
Components Preparation Videos
Soft Glove:
Differential Mechanism:
Tensioner:
Device Assembly:
Affordable, Adaptive Prosthetic Hands
The first set of experiments focuses on validating the efficiency of the proposed selectively lockable differential mechanism to implement different postures and gestures, using only one motor. The second set of experiments focuses on grasping a wide range of everyday life objects, to execute daily living activities.
Robot Hands
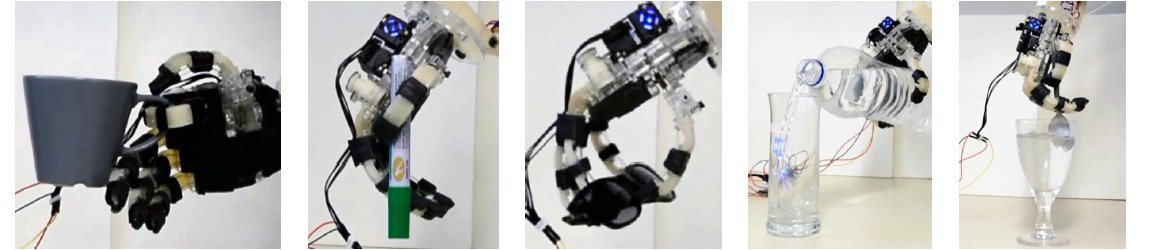
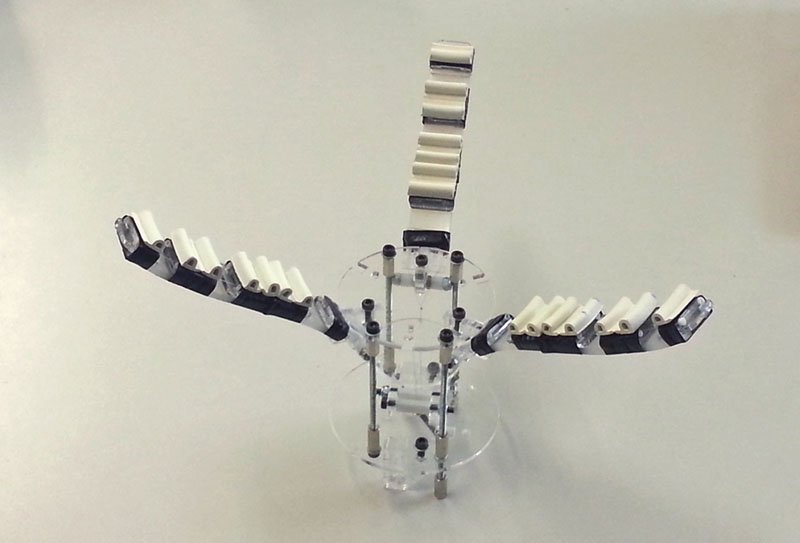
In the following videos, we present extensive experimental paradigms with two fingered, three fingered and four fingered robot hands.
 |
 |
 |
 |
 |
Regarding the first video, we present a series of possible applications for our robot hands. More specifically at the first part of the video we grasp multiple everyday life objects with a four-fingered (each finger consists of two phalanges) robot hand. At the second part of the video, a three-fingered robot hand is used as a myoelectric prosthesis (by an able-bodied person) and the subject grasps using the myoelectric activity of his forearm muscles, two different objects. The third part of the video presents some preliminary results on a grasping capable quadrotor (based on the AR.Drone platform) that we created in our lab, using a two-fingered robot hand prototype. The forth part presents the disk shaped differential mechanism. The fifth part presents a robot hand grasping a full 500ml bottle of water with a lateral pinch grasp, while the sixth part presents a two-fingered robot hand performing a precision grasp of an egg.
The second video presents autonomous anthropomorphic grasp planning experiments using Navigation Function models for the case of the Mitsubishi PA10 robot arm and a four fingered version of our robot hands, developed on purpose. As you can see, the robot hand can efficiently grasp, a series of everyday life objects, even under position uncertainties.
The third video presents the Grebenstein test, where a user hits the robot hand fingers with a hammer, in order to prove their robustness again impacts.
A three fingered robot hand mounted on a KUKA YouBot.