Anthropomorphic robotic hands designed for research in grasping, manipulation, and human–robot interaction.
Our robot hand platforms target reliable, dexterous manipulation while staying lightweight enough for mobile manipulators and humanoid arms.
The designs emphasise underactuated mechanisms, compliant fingertips, and modular finger units so that researchers can adapt the hand to specific experiments.
All hardware files, firmware, and assembly instructions are released openly to encourage replication and extension.
Gallery
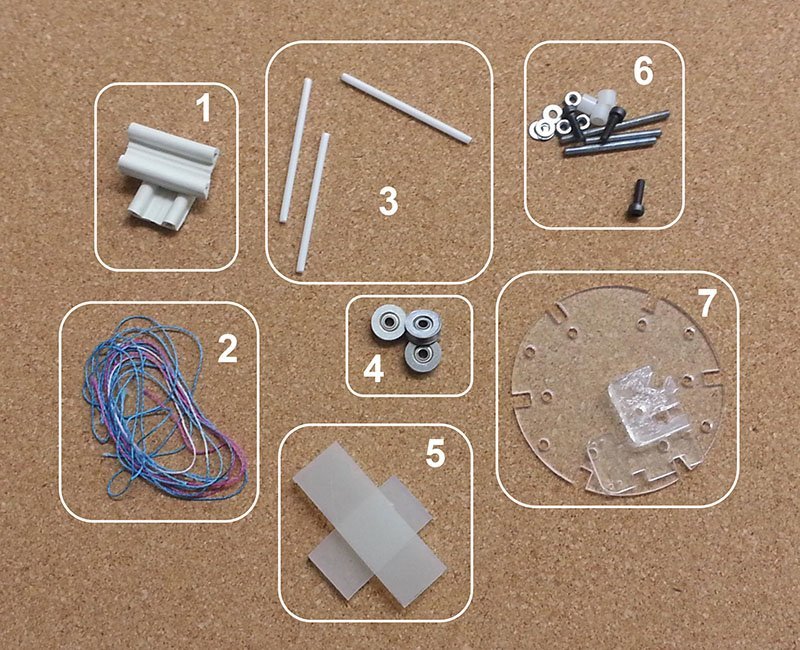
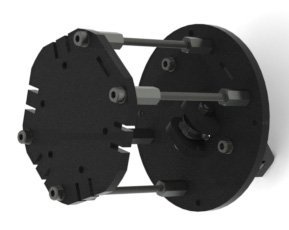
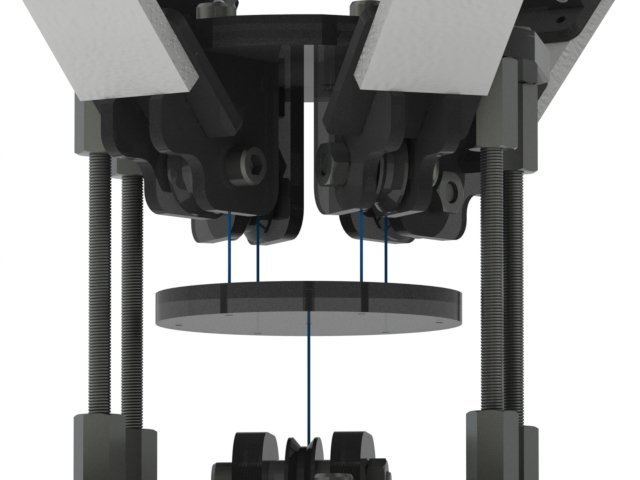
Robot hand — annotated parts overviewHand base assemblyUnderactuated finger moduleDifferential transmission mechanism